Leçon 5:Les déplacements du robot |
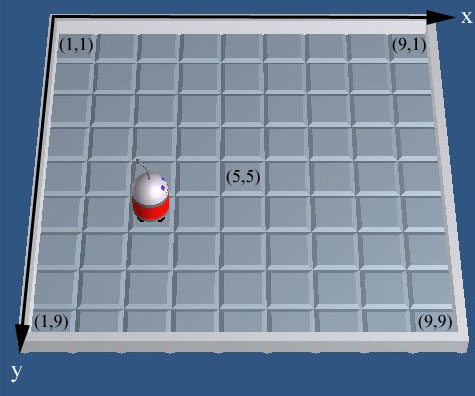
| Une case du terrain est repérée par ses coordonnées (x, y); x et y sont des nombres entiers positifs.
Position du robotLa position du robot est donnée par les deux mots-clef xRobot et yRobot. Pendant l'exécution, xRobot et yRobot ont les valeurs x, y de la case occupée par le robot. Dans l'exemple ci-dessus, xRobot = 3 et yRobot = 6. Direction du robotLa direction suivant laquelle le robot est orienté est donnée par les deux mots-clef dxRobot et dyRobot. Les valeurs de dxRobot et dyRobot correspondent ŕ la variation de xRobot et de yRobot quand le robot avance d'une case devant lui:
Dans l'exemple ci-dessus, dxRobot vaut 1 et dyRobot vaut 0. Comme on peut le remarquer, dxRobot et dyRobot n'ont comme valeurs possibles que 0, 1 et -1. L'une des deux valeurs est nulle et l'autre non nulle |
|
TRAVAIL A FAIRE |
|
|
TRAVAIL A FAIRE |
|